La traduction de cette page n'est pas à jour. Cliquez ici pour voir la dernière version en anglais.
Présentation de l'identification de système
L'identification de système est une méthodologie pour construire des modèles mathématiques de systèmes dynamiques en utilisant les mesures sur les signaux d’entrée et de sortie d'un système.
Le processus d’identification de système requiert les étapes suivantes :
Mesurer les signaux d’entrée et de sortie de votre système dans le domaine temporel ou fréquentiel.
Sélectionner une structure de modèle.
Appliquer une méthode d’estimation pour déterminer les valeurs des paramètres ajustables dans la structure du modèle candidat.
Évaluer le modèle estimé pour voir s’il convient aux besoins de votre application.
Systèmes dynamiques et modèles
Dans un système dynamique, les valeurs des signaux de sortie dépendent à la fois des valeurs instantanées des signaux d’entrée et du comportement passé du système. Par exemple, un siège de voiture est un système dynamique : la forme du siège (position de stabilisation) dépend du poids du passager (valeur instantanée) et du temps que le passager a passé dans la voiture (comportement passé).
Un modèle est une relation mathématique entre les variables d’entrée et de sortie du système. Les modèles de systèmes dynamiques sont généralement décrits par des équations différentielles ou aux différences, des fonctions de transfert, des équations de représentation d'état et des modèles zéro-pôle-gain.
Vous pouvez représenter des modèles dynamiques en temps continu ou en temps discret.
Un exemple souvent utilisé de modèle dynamique est l’équation de mouvement d’un système ressort-masse-amortisseur. Comme le montre la figure suivante, la masse se déplace en réaction à la force F(t) appliquée au support auquel est fixée la masse. L’entrée et la sortie de ce système sont respectivement la force F(t) et le déplacement y(t).
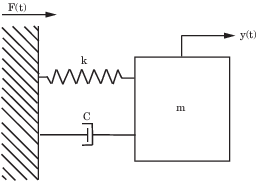
Exemple de modèle dynamique en temps continu
Vous pouvez représenter le même système physique par différents modèles équivalents. Par exemple, vous pouvez représenter le système masse-ressort-amortisseur en temps continu sous la forme d’une équation différentielle de second ordre :
Ici, m est la masse, k est la constante de raideur du ressort et c est le coefficient d'amortissement. La solution de cette équation différentielle vous permet de déterminer le déplacement de la masse y(t) en fonction de la force F(t) à tout moment t pour des valeurs connues des constantes m, c et k.
Considérons le déplacement y(t) et la vitesse comme des variables d’état :
Vous pouvez exprimer l’équation de mouvement précédente sous la forme d’un modèle de représentation d’état du système :
Les matrices A, B et C sont liées aux constantes m, c et k comme suit :
Vous pouvez également obtenir un modèle de fonction de transfert du système ressort-masse-amortisseur en prenant la transformée de Laplace de l’équation différentielle :
Ici, s est la variable de Laplace.
Exemple de modèle dynamique en temps discret
Supposons que vous pouvez observer les variables d’entrée et de sortie F(t) et y(t) du système masse-ressort-amortisseur uniquement à des instants discrets t = nTs, où Ts est un intervalle de temps fixe et n = 0, 1 , 2, .... Les variables sont dites échantillonnées avec un pas d'échantillonnage Ts. Ensuite, vous pouvez représenter la relation entre les variables d’entrée-sortie échantillonnées par une équation aux différences de second ordre, telle que
Souvent, pour simplifier, Ts est considéré comme une unité de temps et l’équation peut être écrite sous la forme
Ici, a1 et a2 sont les paramètres du modèle. Les paramètres du modèle sont liés aux constantes du système m, c et k, ainsi qu’au pas d'échantillonnage Ts.
L’équation aux différences montre la nature dynamique du modèle. La valeur du déplacement à l’instant t dépend non seulement de la valeur de la force F à l’instant précédent, mais aussi des valeurs du déplacement aux deux instants précédents y(t–1) et y(t–2).
Vous pouvez utiliser cette équation pour calculer le déplacement à un instant donné. Le déplacement est représenté sous la forme d’une somme pondérée des valeurs passées d’entrée et de sortie :
Cette équation montre une méthode itérative de génération des valeurs de sortie y(t) à partir des conditions initiales y(0) et y(1) et des mesures d’entrée F(t). Ce calcul est appelé simulation.
La valeur de sortie à un instant donné t peut également être calculée à l’aide des valeurs de sortie mesurées aux deux instants précédents et de la valeur d’entrée à un instant précédent. Ce calcul est appelé prédiction. Pour plus d’informations sur la simulation et la prédiction à l’aide d’un modèle, consultez les thèmes de la page Simulation and Prediction.
Vous pouvez également représenter une équation de mouvement en temps discret sous forme d'une représentation d’état et d'une fonction de transfert en effectuant des transformations similaires à celles décrites dans Exemple de modèle dynamique en temps continu.
Utiliser les données mesurées dans l'identification de système
L'identification de système utilise les signaux d’entrée et de sortie que vous mesurez dans un système pour estimer les valeurs des paramètres ajustables dans une structure de modèle donnée. Vous pouvez construire des modèles à l’aide de signaux d’entrée-sortie dans le domaine temporel, de données de réponses fréquentielles, de signaux de séries temporelles et de spectres de séries temporelles.
Pour obtenir un bon modèle de votre système, vous devez disposer de données mesurées reflétant le comportement dynamique du système. La précision de votre modèle dépend de la qualité de vos données de mesure qui dépendent elles-mêmes de votre design expérimental.
Données dans le domaine temporel
Les données dans le domaine temporel se composent des variables d’entrée et de sortie du système que vous enregistrez à un pas d’échantillonnage uniforme pendant une certaine durée.
Par exemple, si vous mesurez la force d’entrée F(t) et le déplacement de la masse y(t) du système ressort-masse-amortisseur illustré dans Systèmes dynamiques et modèles à une fréquence d’échantillonnage uniforme de 10 Hz, vous obtenez les vecteurs de valeurs mesurées suivants :
Ici, Ts = 0.1 secondes et NTs est le temps lors de la dernière mesure.
Si vous voulez construire un modèle à temps discret à partir de ces données, les vecteurs de données umeas et ymeas, ainsi que le pas d'échantillonnage Ts fournissent suffisamment d’informations pour créer ce modèle.
Si vous voulez construire un modèle à temps continu, vous devez également connaître le comportement des signaux d’entrée entre les échantillons pendant l’expérimentation. Par exemple, l’entrée peut être constante par morceaux (bloqueur d'ordre zéro) ou linéaire par morceaux (bloqueur du premier ordre) entre les échantillons.
Données dans le domaine fréquentiel
Les données dans le domaine fréquentiel représentent les mesures des variables d’entrée et de sortie du système que vous enregistrez ou stockez dans le domaine fréquentiel. Les signaux dans le domaine fréquentiel sont les transformées de Fourier des signaux correspondants dans le domaine temporel.
Les données dans le domaine fréquentiel peuvent également représenter la réponse en fréquence du système, représentée par l’ensemble des valeurs de réponses complexes sur une plage de fréquences donnée. La réponse fréquentielle décrit les sorties correspondant à des entrées sinusoïdales. Si l’entrée est une onde sinusoïdale de fréquence ω, la sortie est également une onde sinusoïdale de même fréquence, dont l’amplitude est égale à A(ω) fois l’amplitude du signal d’entrée, avec un déphasage de Φ(ω) par rapport au signal d’entrée. La réponse fréquentielle est A(ω)e(iΦ(ω)).
Dans le cas du système masse-ressort-amortisseur, vous pouvez obtenir les données de réponse fréquentielle en utilisant une force d’entrée sinusoïdale et en mesurant le gain d’amplitude et le déphasage de la réponse correspondants, sur une plage de fréquences d’entrée.
Vous pouvez utiliser des données dans le domaine fréquentiel pour construire des modèles à temps discret et à temps continu de votre système.
Exigences de qualité des données
L'identification de système exige que vos données rendent compte de la dynamique principale de votre système. Un bon design expérimental assure que vous mesuriez les bonnes variables avec une précision et une durée suffisantes pour rendre compte de la dynamique que vous voulez modéliser. En général, votre expérimentation doit :
Utiliser des entrées qui stimulent de manière adéquate la dynamique du système. Par exemple, un seul pas est rarement une stimulation suffisante.
Mesurer des données suffisamment longtemps pour rendre compte des constantes de temps importantes.
Configurer un système d’acquisition de données avec un bon rapport signal à bruit.
Mesurer des données avec des pas d’échantillonnage ou une résolution de fréquence appropriés.
Vous pouvez analyser la qualité des données avant de construire le modèle à l’aide des fonctions et techniques décrites dans Analyze Data. Par exemple, vous pouvez analyser les spectres d’entrée pour déterminer si la puissance des signaux d’entrée est suffisante sur la bande passante du système. Pour obtenir des recommandations sur l’analyse et le traitement de vos données spécifiques, utilisez advice.
Vous pouvez également analyser vos données pour déterminer les fréquences des pics, les retards d’entrée, les constantes de temps importantes et une indication de non-linéarités avec des outils d’analyse non paramétrique de cette toolbox. Vous pouvez utiliser ces informations pour configurer des structures de modèle pour la construction de modèles à partir de données. Pour plus d’informations, consultez :
Construire des modèles à partir de données
Structure de modèle
Une structure de modèle est une relation mathématique entre les variables d’entrée et de sortie contenant des paramètres inconnus. Les fonctions de transfert avec des pôles et zéros ajustables, les équations de représentation d’état avec des matrices de système inconnues et les fonctions paramétrées non linéaires sont des exemples de structures de modèle.
L’équation aux différences suivante représente une structure de modèle simple :
Ici, a et b sont des paramètres ajustables.
Le processus d’identification du système demande que vous choisissiez une structure de modèle et appliquiez les méthodes d’estimation pour déterminer les valeurs numériques des paramètres du modèle.
Vous pouvez utiliser l’une des approches suivantes pour choisir la structure du modèle :
Vous voulez un modèle, le plus simple possible, capable de reproduire vos données de mesure. Vous pouvez essayer différentes structures mathématiques disponibles dans la toolbox. Cette approche de modélisation est appelée modélisation boîte noire.
Vous voulez une structure spécifique pour votre modèle, que vous auriez éventuellement dérivé des premiers principes, mais vous ne connaissez pas les valeurs numériques de ses paramètres. Vous pouvez représenter la structure de modèle sous la forme d’un ensemble d’équations ou d’un système de représentation d’état dans MATLAB® et estimer les valeurs de ses paramètres à partir des données. Cette approche est appelée modélisation boîte grise.
Estimer les paramètres d'un modèle
Le software System Identification Toolbox™ estime les paramètres d'un modèle en minimisant l’erreur entre la sortie du modèle et la réponse mesurée. La sortie ymodel d'un modèle linéaire est donnée par
ymodel(t) = Gu(t)
Ici, G est la fonction de transfert.
Pour déterminer G, la toolbox minimise la différence entre la sortie du modèle ymodèle(t) et la sortie mesurée ymes(t). Le critère de minimisation est une norme pondérée de l’erreur, v(t), où
v(t) = ymeas(t) – ymodel(t).
ymodel(t) est l'un des éléments suivants :
Réponse simulée (Gu(t) du modèle pour une entrée donnée u(t))
Réponse prédite du modèle pour une entrée donnée u(t) et les mesures passées de la sortie (ymeas(t-1), ymeas(t-2),...).
Par conséquence, l’erreur v(t) est appelée erreur de simulation ou erreur de prédiction. Les algorithmes d’estimation ajustent les paramètres dans la structure du modèle G de sorte que la norme de cette erreur soit la plus petite possible.
Configurer l’algorithme d’estimation des paramètres
Vous pouvez configurer l’algorithme d’estimation en :
Configurant le critère de minimisation pour concentrer l’estimation dans une plage de fréquences souhaitées, par exemple pour insister davantage sur les basses fréquences et moins mettre l’accent sur la contribution du bruit à haute fréquence. Vous pouvez également configurer le critère afin de cibler les besoins de l’application prévue pour le modèle, comme la simulation ou la prédiction.
Spécifiant des options d’optimisation pour les algorithmes d’estimation itératifs.
La majorité des algorithmes d’estimation de cette toolbox sont itératifs. Vous pouvez configurer un algorithme d’estimation itératif en spécifiant des options, comme la méthode d’optimisation et le nombre maximal d’itérations.
Pour plus d’informations sur la configuration de l’algorithme d’estimation, consultez Options to Configure the Loss Function et les rubriques relatives à l’estimation de structures de modèles spécifiques.
Modélisation boîte noire
Sélectionner la structure et l’ordre des modèles boîte noire
La modélisation boîte noire est utile lorsque votre intérêt principal est de vous ajuster aux données, indépendamment d’une structure mathématique particulière du modèle. La toolbox propose plusieurs structures de modèle boîte noire linéaire et non linéaire qui sont habituellement utiles pour représenter des systèmes dynamiques. La complexité de ces structures de modèle varie en fonction de la flexibilité dont vous avez besoin pour représenter la dynamique et le bruit dans votre système. Vous pouvez choisir l’une de ces structures et calculer ses paramètres pour correspondre aux données de réponse mesurées.
La modélisation boîte noire est habituellement un processus par approximations successives consistant à estimer les paramètres de différentes structures et comparer les résultats. Généralement, vous commencez par la structure de modèle linéaire simple et progressez vers des structures plus complexes. Vous pouvez également choisir une structure de modèle parce que vous connaissez mieux cette structure ou parce que vous avez des besoins applicatifs spécifiques.
Les structures de modèle boîte noire linéaire les plus simples sont celles qui exigent de configurer le moins d’options :
Fonction de transfert, avec un nombre donné de pôles et de zéros
Modèle ARX linéaire, qui est le modèle polynomial d’entrée-sortie le plus simple
Modèle de représentation d'état, que vous pouvez estimer en spécifiant le nombre d’états du modèle
L’estimation de certaines de ces structures utilise également des algorithmes d’estimation non itératifs, ce qui réduit encore leur complexité.
Vous pouvez configurer une structure de modèle à l’aide de l’ordre du modèle. La définition de l’ordre du modèle dépend du type de modèle que vous sélectionnez. Par exemple, si vous choisissez une représentation par une fonction de transfert, l’ordre du modèle est lié au nombre de pôles et de zéros. Pour une représentation d’état, l’ordre du modèle correspond au nombre d’états. Dans certains cas, comme les structures de modèle ARX linéaire et de représentation d’état, vous pouvez estimer l’ordre du modèle à partir des données.
Si les structures de modèle simples n'offrent pas de bons modèles, vous pouvez sélectionner des structures de modèle plus complexes en :
Spécifiant un ordre de modèle plus élevé pour la même structure de modèle linéaire. Un ordre de modèle plus élevé augmente la flexibilité du modèle pour rendre compte de phénomènes complexes. Cependant, un ordre inutilement élevé peut rendre le modèle moins fiable.
Modélisant explicitement le bruit en incluant le terme He(t) comme le montre l’équation suivante.
y(t) = Gu(t) + He(t)
Ici, H modélise la perturbation additionnelle en la traitant comme la sortie d’un système linéaire piloté par une source de bruit blanc e(t).
L’utilisation d’une structure de modèle qui modélise explicitement la perturbation additionnelle peut aider à améliorer la précision du composant G mesuré. En outre, cette structure de modèle est utile lorsque votre intérêt principal est d’utiliser le modèle pour prédire des valeurs de réponse futures.
Utilisant une structure de modèle linéaire différente.
Consultez Linear Model Structures.
Utilisant une structure de modèle non linéaire.
Les modèles non linéaires sont plus flexibles que les modèles linéaires d’ordres similaires pour capturer des phénomènes complexes. Consultez Nonlinear Model Structures.
En fin de compte, il vous faut choisir la structure de modèle la plus simple correspondant le mieux à vos données mesurées. Pour plus d’informations, consultez Estimer des modèles linéaires avec Quick Start.
Indépendamment de la structure que vous choisissez pour l’estimation, vous pouvez simplifier le modèle en fonction des besoins de votre application. Par exemple, vous pouvez séparer la dynamique mesurée (G) de la dynamique du bruit (H) pour obtenir un modèle plus simple qui représente uniquement la relation entre y et u. Vous pouvez également linéariser un modèle non linéaire autour d’un point de fonctionnement.
Utiliser des structures de modèle non linéaire
Un modèle linéaire suffit souvent pour décrire avec précision la dynamique du système et, dans la plupart des cas, il est préférable d’essayer d’abord des modèles linéaires. Si la sortie du modèle linéaire ne reproduit pas de manière adéquate la sortie mesurée, vous devriez peut-être utiliser un modèle non linéaire.
Vous pouvez évaluer la nécessité d’utiliser une structure de modèle non linéaire en traçant la réponse du système en fonction d’une entrée. Si vous remarquez que les réponses sont différentes selon le niveau ou le signe de l’entrée, essayez d’utiliser un modèle non linéaire. Par exemple, si la réponse en sortie, à une augmentation en entrée, est plus rapide que la réponse à une diminution, vous avez peut-être besoin d’un modèle non linéaire.
Avant de construire un modèle non linéaire pour un système que vous savez non linéaire, essayez de transformer les variables d’entrée et de sortie de sorte que la relation entre les variables transformées soit linéaire. Par exemple, considérons un système ayant comme entrée le courant et la tension d’un thermoplongeur et comme sortie la température du liquide chauffé. La sortie dépend des entrées par le biais de la puissance du thermoplongeur, qui est égale au produit du courant et de la tension. Au lieu de construire un modèle non linéaire pour ce système à deux entrées et une sortie, vous pouvez créer une nouvelle variable en prenant le produit du courant et de la tension et en construisant un modèle linéaire décrivant la relation entre la puissance et la température.
Si vous ne pouvez pas déterminer de transformations de variables créant une relation linéaire entre des variables d’entrée et de sortie, vous pouvez utiliser des structures de modèle non linéaire comme des modèles ARX ou Hammerstein-Wiener non linéaires. Pour connaître la liste des structures de modèle non linéaire supportées et savoir comment les utiliser, consultez Nonlinear Model Structures.
Exemple d’estimation boîte noire
Vous pouvez utiliser l’application System Identification ou des commandes pour estimer des modèles linéaires et non linéaires de différentes structures. Dans la plupart des cas, vous choisissez une structure de modèle et estimez les paramètres du modèle à l’aide d’une seule commande.
Considérons le système masse-ressort-amortisseur décrit dans Systèmes dynamiques et modèles. Si vous ne connaissez pas l’équation de mouvement de ce système, vous pouvez utiliser une approche de modélisation boîte noire pour construire un modèle. Par exemple, vous pouvez estimer des fonctions de transfert ou des modèles de représentation d’état en spécifiant les ordres de ces structures de modèle.
Une fonction de transfert est un rapport de polynômes :
Pour le système masse-ressort-amortisseur, la fonction de transfert est
qui est un système sans zéro et avec 2 pôles.
En temps discret, la fonction de transfert du système masse-ressort-amortisseur peut être
où les ordres du modèle correspondent au nombre de coefficients du numérateur et du dénominateur (nb = 1 et nf = 2) et le retard entrée-sortie est égal à l’exposant d’ordre le plus faible z–1 dans le numérateur (nk = 1).
En temps continu, vous pouvez construire un modèle de fonction de transfert linéaire avec la commande tfest.
m = tfest(data,2,0)
Ici, data représentent vos données d’entrée-sortie mesurées, représentées sous la forme d’un objet iddata, et l’ordre du modèle est un ensemble consistué du nombre de pôles (2) et du nombre de zéros (0).
De même, vous pouvez construire une structure d’erreur de sortie pour un modèle en temps discret avec la commande oe.
m = oe(data,[1 2 1])
L’ordre du modèle est [nb nf nk] = [1 2 1]. Habituellement, on ne connait pas les ordres du modèle à l’avance. Essayez plusieurs valeurs d’ordre du modèle jusqu’à trouver les ordres produisant un modèle acceptable.
Sinon, vous pouvez choisir une structure de représentation d’état pour représenter le système masse-ressort-amortisseur et estimer les paramètres du modèle avec la commande ssest ou n4sid.
m = ssest(data,2)
Ici, le deuxième argument 2 représente l’ordre ou le nombre d’états dans le modèle.
Dans la modélisation boîte noire, vous n’avez pas besoin de l’équation de mouvement du système, seulement d’une estimation des ordres du modèle.
Pour plus d'informations sur la construction de modèles, consultez Steps for Using the System Identification App et Model Estimation Commands.
Modélisation boîte grise
Dans certaines situations, vous pouvez déduire la structure de modèle de principes physiques. Par exemple, la relation mathématique entre la force d’entrée et le déplacement résultant de la masse dans le système ressort-masse-amortisseur illustré dans Systèmes dynamiques et modèles est bien connue. Sous la forme de représentation d’état, le modèle est décrit par
où x(t) = [y(t);v(t)] est le vecteur d’état. Les coefficients A, B et C sont fonctions des paramètres du modèle :
A = [0 1; –k/m –c/m]
B = [0; 1/m]
C = [1 0]
Ici, vous connaissez entièrement la structure du modèle, mais pas les valeurs de ses paramètres m, c et k.
Dans l’approche boîte grise, vous utilisez les données pour estimer les valeurs des paramètres inconnus de votre structure de modèle. Vous spécifiez la structure de modèle par un ensemble d’équations différentielles ou aux différences dans MATLAB et proposez une estimation initiale pour les paramètres inconnus spécifiés.
En général, vous construisez des modèles boîte grise en :
Créant une structure de modèle type.
Configurant les paramètres du modèle avec des valeurs initiales et des contraintes (le cas échéant).
Appliquant une méthode d’estimation à la structure de modèle et en calculant les valeurs des paramètres du modèle.
Le tableau suivant résume les manières de spécifier une structure de modèle boîte grise.
| Représentation de la structure d'un modèle boîte grise | En savoir plus |
|---|---|
Représenter la structure d'un modèle de représentation d’état en tant qu'un objet de modèle Vous pouvez calculer les valeurs des paramètres comme m, c et k à partir des matrices de représentation d’état A et B. Par exemple, m = 1/B(2) et k = –A(2,1)m. | |
Représenter la structure d'un modèle de représentation d’état en tant qu'un objet de modèle idgrey. Vous pouvez estimer directement les valeurs des paramètres m, c et k. | Grey-Box Model Estimation |
Évaluation de la qualité du modèle
Après avoir estimé le modèle, vous pouvez évaluer sa qualité :
En fin de compte, vous devez évaluer la qualité de votre modèle en estimant si le modèle répond de manière adéquate aux besoins de votre application. Pour plus d'information sur d’autres techniques d'analyse de modèle disponibles, veuillez consultez Model Analysis.
Si votre modèle n’est pas satisfaisant, vous pouvez améliorer vos résultats de manière itérative en essayant une structure de modèle différente, en modifiant les paramètres de l’algorithme d’estimation ou en effectuant des traitements supplémentaires sur vos données. Si ces modifications n’améliorent pas vos résultats, vous devrez peut-être revoir votre design expérimental et vos procédures de collecte de données.
Comparer la réponse du modèle à la réponse mesurée
Généralement, vous évaluez la qualité d’un modèle en comparant la réponse du modèle à la sortie mesurée pour le même signal d’entrée.
Supposons que vous utilisez une approche de modélisation boîte noire pour créer des modèles dynamiques du système ressort-masse-amortisseur. Vous essayez différents ordres et structures de modèle, comme :
model1 = arx(data, [2 1 1]); model2 = n4sid(data, 3)
Vous pouvez simuler ces modèles avec une entrée particulière et comparer leurs réponses aux valeurs de déplacement mesurées pour la même entrée appliquée au système réel. La figure suivante compare les réponses simulées et mesurées pour une entrée indicielle.
La figure indique que model2 est meilleur que model1 car model2 correspond mieux aux données (65 % contre 83 %).
Le pourcentage de correspondance indique l’accord entre la réponse du modèle et la sortie mesurée : 100 signifie une correspondance parfaite et 0 indique une correspondance médiocre (c’est-à-dire que la sortie du modèle correspond autant à la sortie mesurée que la moyenne des sorties mesurée).
Pour plus d’informations, consultez les rubriques sur la page Compare Output with Measured Data.
Analyser les résidus
Le software System Identification Toolbox vous permet d’effectuer une analyse des résidus pour évaluer la qualité du modèle. Les résidus représentent la partie des données de sortie qui ne sont pas expliquées par le modèle estimé. Un bon modèle a des résidus sans corrélation avec les valeurs d'entrées passées.
Pour plus d’informations, consultez les rubriques sur la page Residual Analysis.
Analyser l’incertitude du modèle
Lorsque vous estimez les paramètres d'un modèle à partir de données, vous obtenez des valeurs nominales qui sont précises dans une région de confiance. La taille de cette région est déterminée par les valeurs des incertitudes des paramètres calculées pendant l’estimation. L’amplitude de ces incertitudes offre une mesure de la fiabilité du modèle. Des ordres de modèle inutilement élevés, des niveaux de stimulation inadéquats dans les données d’entrée et un rapport signal à bruit médiocre dans les données mesurées peuvent conduire à de grandes incertitudes dans les paramètres.
Vous pouvez calculer et visualiser l’effet des incertitudes des paramètres sur la réponse du modèle dans les domaines temporel et fréquentiel à l’aide des cartes des zéros et des pôles, des diagrammes de réponse de Bode et des diagrammes de réponses indicielles. Par exemple, sur le diagramme de Bode du modèle estimé suivant, les régions ombrées représentent l’incertitude en amplitude et en phase de la réponse fréquentielle du modèle, calculée à l’aide de l’incertitude des paramètres. Le diagramme montre que l’incertitude est faible uniquement dans la plage de fréquences de 5 à 50 rad/s, ce qui indique que le modèle est fiable uniquement sur cette plage.
Pour plus d’informations, consultez Compute Model Uncertainty.
Ressources
La documentation System Identification Toolbox vous offre les informations nécessaires pour utiliser ce produit. Des ressources additionnelles sont disponibles pour vous aider à en savoir plus sur des aspects plus précis de la théorie d’identification du système et de ses applications.
Le livre suivant décrit des méthodes d’identification de système et de modélisation physique :
Ljung, Lennart et Torkel Glad. Modeling of Dynamic Systems. Prentice Hall Information and System Sciences Series. Englewood Cliffs, NJ : PTR Prentice Hall, 1994.
Ces livres offrent des informations détaillées sur la théorie et les algorithmes d’identification de système :
Ljung, Lennart. System Identification: Theory for the User. Deuxième édition. Prentice Hall Information and System Sciences Series. Upper Saddle River, NJ : PTR Prentice Hall, 1999.
Söderström, Torsten et Petre Stoica. System Identification. Prentice Hall International Series in Systems and Control Engineering. New York : Prentice Hall, 1989.
Pour des informations sur le traitement de données dans le domaine fréquentiel, consultez le livre suivant :
Pintelon, Rik et Johan Schoukens. System Identification. A Frequency Domain Approach. Hoboken, NJ : John Wiley & Sons, 2001. https://doi.org/10.1002/0471723134.
Pour des informations sur l’identification non linéaire, consultez les références suivantes :
Sjöberg, Jonas, Qinghua Zhang, Lennart Ljung, Albert Benveniste, Bernard Delyon, Pierre-Yves Glorennec, Håkan Hjalmarsson et Anatoli Juditsky. « Nonlinear Black-Box Modeling in System Identification: A Unified Overview. » Automatica 31, n° 12 (décembre 1995) : 1691–1724. https://doi.org/10.1016/0005-1098(95)00120-8.
Juditsky, Anatoli, Håkan Hjalmarsson, Albert Benveniste, Bernard Delyon, Lennart Ljung, Jonas Sjöberg et Qinghua Zhang. « Nonlinear Black-Box Models in System Identification: Mathematical Foundations. » Automatica 31, n° 12 (décembre 1995) : 1725–50. https://doi.org/10.1016/0005-1098(95)00119-1.
Zhang, Qinghua et Albert Benveniste. « Wavelet Networks. » IEEE Transactions on Neural Networks 3, n° 6 (novembre 1992) : 889–98. https://doi.org/10.1109/72.165591.
Zhang, Qinghua. « Using Wavelet Network in Nonparametric Estimation. » IEEE Transactions on Neural Networks 8, n° 2 (mars 1997) : 227–36. https://doi.org/10.1109/72.557660.
Pour plus d'informations sur les systèmes et les signaux, consultez le livre suivant :
Oppenheim, Alan V. et Alan S. Willsky, Signals and Systems. Upper Saddle River, NJ : PTR Prentice Hall, 1985.
Le manuel suivant décrit des techniques numériques d’estimation de paramètres à l’aide de la minimisation de critère :
Dennis, J. E., Jr. et Robert B. Schnabel. Numerical Methods for Unconstrained Optimization and Nonlinear Equations. Upper Saddle River, NJ : PTR Prentice Hall, 1983.
Sujets associés
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)